慧聪消防网讯 2023消防行业品牌盛会火热进行中 2023消防中国万里行 CFIC2022精彩回顾 易招通牛企榜
随着消防救援队伍的改革转隶,各级消防力量立足“全灾种、大应急”的任务要求,在“智慧应急”的需求牵引下,开展了一系列城市应急通信网络保障体系的建设工作,初步实现了“组成网、随人走,不中断、联得上,听得见、看得清,能图传、能分析”的目标。然而,伴随着城市规模的不断扩大,致灾因素愈加复杂,致使重特大灾害事故形式愈加严峻,现有应急通信网络保障体系难以满足公网设施与道路损毁、卫星信号拒止等极端情况下灾情信息的精准感知与实时回传。
2022年,应急管理部发布《“十四五”应急救援力量建设规划》,要求加快推进无人机等新型网络设施在灾害监测与应急救援中的智能化应用。由于具有灵活部署、无人化作业、机动性强、全地形可移动等特点,当灾害事故发生后,无人机能够迅速深入危险区域执行态势感知与侦测搜救任务,并能够利用自身携带的通信设备实现应急通信网络的恢复重构与灾情信息的实时回传[1]。然而,现有研究大多针对单体无人机的灾灾前或初期侦测,应用场景和方式单一,且与救援过程缺乏紧密联系,无人机集群目前还存在“有智无慧、有感无知、有协无同”等瓶颈性问题,大规模城市应急场景下低空区域的物联感知体系仍有待进一步深入探索。基于此,笔者提出城市低空感知应急物联网的基本概念与体系架构,并结合城市生命线、公共安全、生产安全、自然灾害等典型城市安全领域,探讨态势感知、组网重构与实时回传等关键技术的应用。
1.城市低空感知应急物联网基本概念与体系架构
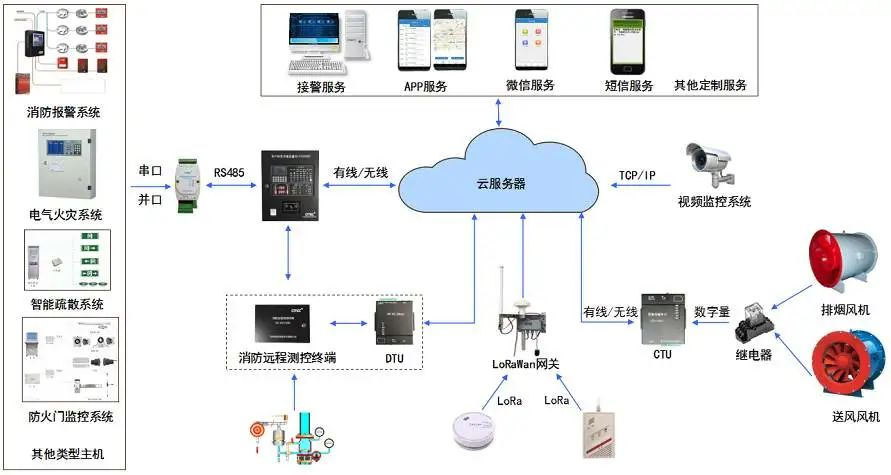
低空感知应急物联网面向城市生命线、公共安全、生产安全、自然灾害等典型城市安全领域,以无人机等新型物联感知设施为核心,旨在实现人(应急作业人员、被困群众等)、事(安全监测、应急救援等)、物(无人机集群、单兵装备等物联感知设施)的全连接,提供协同态势感知、随遇组网接入、实时可靠传输等物联感知服务。物联网是一种较典型的应用驱动式网络技术,结合低空感知与应急通信在复杂工业场景中的建设成果,充分利用现有系统并提炼应用消防救援经验,可将低空感知应急物联网划分为五层架构:应急感知层、基础网络层、指挥中心层、技术支撑体系层与系统应用层,如图1所示。
(1)应急感知层:主要由低空感知领域、灾害防控领域、应急救援领域、救援力量领域、感知资源综合管理五部分构成。通过建立完备的低空感知体系,对消防和应急救援场景下的公共消防设备、有害气体进行检测监管,对室内外人员进行定位感知。实现了灾情人员、消防装备的动态管理,实时获取灾情现场复杂多变的各种信息,促进了多种数据信息交互融合。
(2)基础网络层:在现有城市应急通信网络资源基础上进行升级改造,包括指挥信息网、电子政务外网、互联网、卫星通信网、无线通信网实现数据交互和网络资源汇集。在保障城市消防安全日常感知维护的基础上,保证灾情突发场景下信息的高精获取、高速传输、高效利用。
(3)指挥中心层:由“一厅三室”和配套系统构成,构建现代化应急救援指挥服务中心,提高救援队伍应急处置与救援能力。指挥大厅各个部门分工明确,在网络机房和相应配套系统提供的现代化管控平台基础上,实现对灾情信息的实时监控、重点研判,高效迅速地做出应对举措和救援方案。

图1 城市低空感知应急物联网架构
Fig.1 Urban low-altitude sensing emergency IoT architecture
(4)技术支撑体系层:包含实现无人机集群协同态势感知、按需组网重构与实时回传的关键技术,三者互为支撑,联动优化。态势感知通过博弈匹配,路径规划等技术手段,克服城市大型建筑物、工厂无法实现信号全面覆盖,无人机飞行时任务突发等因素限制的难题。在此基础上考虑到无人机集群的高速移动性和城市灾害场景通信设备的易损毁性,采用组网重构技术有效提升通信链路的稳定性。同时,考虑无人机与基站的距离过远或信号传播环境的干扰,通过机会传输模式,建立了无人机与基站的动态通信链路,有效提升了灾情现场数据实时回传的能力。
(5)系统应用层:主要分为应急救援业务和灾害防控业务,由应急救援指挥调度、应急救援力量管理、灾害预警防控、社会应急技术服务、应急信用监督管理五大应用构成。各应用之间分工明确,相辅相成,在宏观领域建立了一整套完备的应急体系,促进了城市应急安全领域的规范化、信息化、高效化。
2.城市低空感知应急物联网关键技术与应用
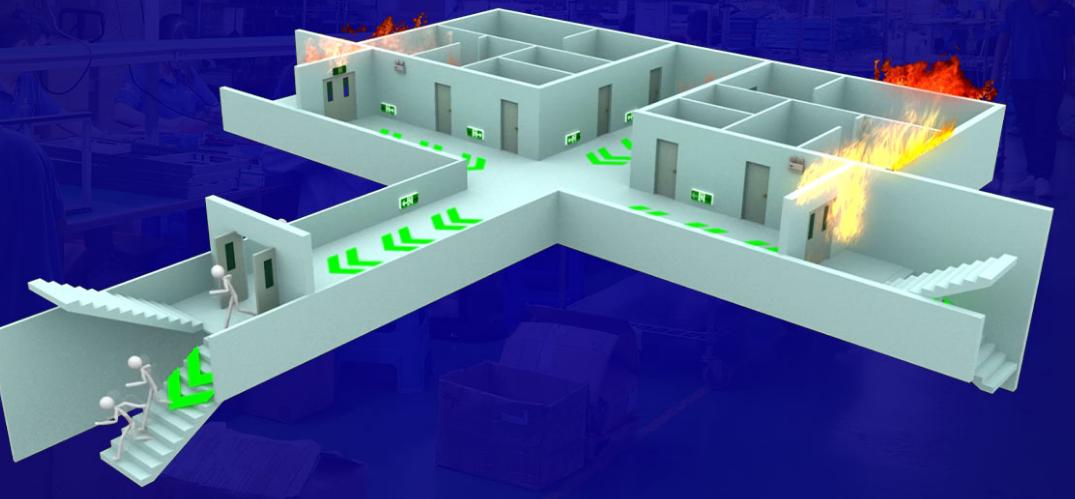
城市低空感知应急物联网通过对重点场所进行日常巡检,将感知数据传输给应急控制中心,构建可视化的城市安全一体化平台,实现对灾情的预防和快速处理。在城市灾情发生时,应急救援的首要任务是了解受灾区域具体情况。城市低空感知应急无人机群从三维角度更全面的对事故发生目标点进行最短时间的遍历侦测,第一时间了解灾情现场情况,使应急控制中心能做出更高效及时的救援决策。接着,低空救援无人机集群到达受灾区域建立应急网络保证信息的传输,对现场实时感知,辅助完成救援任务。场景描述如图2所示。
2.1 无人机集群巡察飞行调度技术
在城市消防救援场景下,无人机集群可用于火灾预警、环境监测、道路监测等日常巡察用途。在城市消防建设中,每7~8公里会建立一个消防控制中心,并配备相应的消防无人机等装备。日常情况下,各个区域的无人机在各自巡检区域进行巡航,例如:无人机在日常巡检时发现某区域出现交通事故、堵车等情况后,及时反馈给交通部门,协助车辆分流,道路疏通等工作。无人机对城市重点设施或易发生危险的区域巡检检测,了解设备当前状态,减少事故发生的风险。
当某一区域发生灾情或出现救援任务等突发事件产生时,临近区域内的无人机应当迅速和事件突发地区的无人机组成一定规模的无人机集群,并由消防救援指挥中心统一调度,协同进行递进式环境侦察,因此无人机集群飞行调度技术十分关键。
由于无人机集群飞行调度面临的任务多样性和环境复杂性,合理的任务分配模型和算法将极大提高集群的感知效率。动态任务分配问题是一种复杂的组合优化问题,需要在满足时间要求,协同要求,路径规划以及任务完成度等要求的同时确定好集群成员和多项任务之间对应关系[2]。在应急调度过程中,无人机实时地向控制器回传自身位置,控制器在收到突发感知任务后,结合集群内无人机的地理位置、资源可用性等多维因素在极短的时间内完成无人机个体和突发任务之间的匹配。在时变无人机拓扑基础上实现任务的合理分配和资源的高效利用对决策时间提出了很高的要求,且为了充分权衡无人机的个体收益和集群整体收益,应将任务分配问题建模为任务完成度约束下的全动态二部图匹配博弈问题[3]。
2.2 无人机集群协同态势感知技术
当城市大型综合体、化工厂等复杂场所下发生灾情时,救援指挥中心亟需获取灾情地区的实时画面、人员伤亡情况等信息。以传统多跳回传方式构建的无线传感网受限于可靠性和实时性,无法满足灾情发生后的应急态势感知需求。无人机集群依靠高机动性、全地形可移动、覆盖面广等特性能够全方位覆盖灾情现场,实时反馈建筑物、相关人员的状态信息,为救灾指挥中心的决策提供全面的信息支持。为了保障突发感知任务的执行效率,控制器需要在任务属性、环境地形等约束下为无人制定飞行路径。
无人机集群路径规划是动态感知过程中关键技术。规划路径不仅要保证全局路径最优,完成任务时间最短,还要考虑任务过程中避障及轨迹优化等局部规划问题。此外,集群无人机路径规划需要在单无人机路径规划模型基础上进一步考虑无人机集群的适应度函数、无人机间复杂的约束条件、共同的优化目标等[2]。实际的突发任务往往发生在灾情出现或者紧急勘测时,于是感知信息的时效性显得尤为重要,因此数据的信息年龄(AOI, Age of information)可作为无人机集群路径规划问题的重要约束。目前已有的无人机路径规划方法以启发式算法为主,然而这类算法在无人机集群规模较大时收敛速度较慢且容易陷入局部最优。为了充分发挥无人机集群的潜力,可以将数据的AOI作为优化目标,将决策问题抽象为马尔可夫决策过程,建立深度强化学习框架下的路径规划策略[4,5],将在线样本收集和历史信息学习结合,训练不同场景下的决策模型和参数。控制器可以根据实时环境态势和历史决策信息综合生成决策路径,为动态环境下的无人机集群数据感知提供有力的基础保障。
2.3 无人机集群按需组网重构技术
当城市突发灾害事故时,应急调度中心通过态势感知无人机收集到的灾情信息对灾情做出基本评估和判断,并派出适当数量救援无人机集群进行应急救灾。由于事故通常会造成受灾区域中部分有线通信线路中断和基站设备损毁,所以救援无人机集群应具备地面基础网络接入能力和自组织通信能力,在保证受灾区域网络畅通的同时,传输现场实时状态信息并进行基础援救。
在应急救援的动态场景下,低空救援应急无人机群的业务时变(如消防无人机、监控无人机、中继无人机)产生的不同通信需求和高移动性导致其与实际匹配的网络不适配,无法稳定高效的实现数据交互。同时,无人机多种通信指标和限制条件使通信质量Qos求最优解为一个NP-hard问题。针对城市低空复杂通信环境,笔者通过分析无人机位置的变化处于不同的网络环境和业务属性的切换带来的网络需求变化这两种时变特征,考虑结合联合模糊和熵权理论两种附权算法实现无人机通信质量的多目标优化[5],得出统一的效用函数。其次,无人机集群建立低空连接形成自组网络拓扑图,但由于其在飞行过程中会出现建筑遮挡导致通信中断,续航能力弱需脱离网络充电或者变更任务等情况,即拓扑网络节点的脱离和加入,从而需要通过更高等级的连通性以确保网络的容错性与抗毁性。笔者认为可将联盟博弈引入时变拓扑图,利用图联盟博弈对远程传输链路建立问题建模,从而实现多种指标的权衡优化,保证网络连通性的同时,提升容错能力。此外,在策略迭代过程中,也可使用强化学习等方法,对无人机的巡检或灭火等行为进行事先预测,实现对博弈策略空间的缩减,从而大幅度减小时间复杂度,满足飞行物联网的实时动态稳定性。
2.4 基于机会利用的实时回传技术
城市内灾情发生后,救灾人员需要及时地获取救灾现场节点的信息,从而实时掌握灾害现场形势,迅速做出救援措施,这非常依赖于无人机实时回传的数据支撑。在城市消防救援场景中,通常每7~8公里建立一个地面控制基站,因此只有少部分救援无人机可以实现与地面基站的直接链接,或与基站附近的其他无人机交互数据实现中继链接,其他无人机无法与基站建立链接关系,这极大影响低空感知应急物联网整体的实时回传性能[8]。同时受到城市结构复杂型建筑物的遮挡,无人机的与基站的信息实时回传受到了更大的干扰。
在此场景下,机会传输模式可以解决由于距离过远或信号传播环境干扰,无人机无法与基站建立通信链路进行实时回传信息的问题。该传输模式具体表述如下:无人机在当前时间段内无法与任何无人机或地面基站构建数据传输链路,但是该无人机在任务完成前的某一时间段中有机会通过其他中继无人机或者直接连接基站的方式,构建起该无人机到基站的数据传输链路,实现数据的实时回传。在没有办法实时建立链路的时候,通过预测无人机时空相遇的通信机会,进行传输调度[9]。
无人机在应急场景中受任务属性驱动,自身位姿和空间位置动态改变,带来组网拓扑结构动态变化的同时,增加了机会传输的可能性。同时无人机的飞行策略会按照预定路线进行,并不是随机飞行。因此,应急通信组网的拓扑结构在动态变化的同时具有一定的规律性。笔者为了获取城市救灾应急场景下无人机集群整体稳定的链接关系,实现灾情现场感知信息的高效实时回传,基于无人机集群多条通信链路的机会传输模式,建立了多层的博弈匹配模型,通过多层匹配的应急数据动态回传算法,预测无人机相遇的时机,实现灾情现场信息高效稳定的实时传输[10]。

Fig.2 Architecture hierarchy of
Low altitude sensing emergency Internet
2.5 技术总结
针对应急救援环境的复杂性和任务的突发性,可设计全动态二部图匹配方法,通过强化学习适配不同环境与突发事件,实现无人机群与任务的动态分配。在确定设备任务后,无人机群会感知周围环境并其用于自身的决策基础,结合离线地图数据,制定合适的飞行路线,在更短时间内完成整个受灾场景的情况获取。期间,不同救援任务的无人机相互协作形成低空自组网,考虑到无人机高移动性和网络需求多样性,为保证现场信息的实时可靠传输,依据任务属性建立联盟,结合联合模糊和熵权理论得到唯一效用函数,通过博弈保证时变拓扑图的连通性和整体网络Qos,并基于多层匹配的应急数据动态回传算法,实现灾情现场感知信息的高效实时回传。
在策略迭代更新的过程中, 博弈论、强化学习和优化理论可以提供强大的理论和算法设计指导。其中,通过感知周围环境,运用强化学习能适配不同环境与突发事件,实现全动态场景无人机与任务匹配。联合模糊和熵权理论综合通信质量需求的主观因素和客观因素,充分考虑各指标影响,将优化目标归一化,确定唯一效用函数。博弈论作为分布式资源优化的重要理论工具,降低每个无人机的计算负载,拥有低计算复杂度,符合无人机的时效要求。基于任务驱动的联盟图博弈完美适用于无人机组网形成通信网络时变拓扑图,实现整体系统的性能优化。
3.面向城市安全的低空感知应急物联网应用
3.1 城市基础设施风险感知
低空感知应急物联网可利用其全方位、全地形、全天候态势感知能力提升城市生命线风险管控水平,对人口集中、产业集聚、设施老旧的城市生命线进行风险感知,实时监测燃气管网泄漏、沼气浓度、供水管网泄漏、城市内涝、道路坍塌、桥梁病害等风险要素,推动重点公共基础设施物联感知数据汇聚和治理,提高城市公共资源的管控水平与服务能力。实现城市安全运行管理“从看得见到看得准、从事后应急处置向事前预测预警、从被动应对向主动防控”根本性转变。
3.2 城市公共与生产安全感知
面向重点单位、要害部位、基层社区等区域,通过低空物联感知设施设备的按需部署,对城乡轨道交通等公共安全领域与危险化学品、煤矿、非煤矿山、烟花爆竹、建筑施工等高危行业领域的安全运行状态进行监测,实时回传气体、压力、液位、温度、位移、人员、车辆、机械设备、环境等运行状态和断电、断网、断路等基础设施故障状态,实现关键安全监测数据汇聚至城市安全风险综合监测预警平台,对公共安全与生产安全高风险事项进行分析预警,提升城市公共安全治理水平。
3.3 城市自然灾害感知
火灾、洪涝等突发性高、影响区域较为集中的灾害是城市自然灾害预防感知的主要目标。城市中自然灾害频发或存在潜在风险的地区需要低空感知应急物联网周期性地监控。巡检无人机通过与部署在城市森林、湖泊区域的传统无线感知节点结合,接收节点感知信息,实现检测区域的全方位、高覆盖性、低能耗、低成本的监控预防。综合天气预报和气候预测,构建以城市森林火险监测、城市洪涝预报为主的大范围、远距离、全天候的城市自然灾害预防监控平台,有效预警防控自然灾害,保障人民生命财产安全。
4.结束语
城市场景下环境的多样性和感知任务的复杂性对消防救援感知系统提出了新的要求,笔者针对现阶段城市应急救援指挥体系中态势感知与应急通信网络保障方面的不足,提出了城市低空感知应急物联网基本概念和五层体系架构。阐述了城市低空感知应急物联网中态势感知、按需组网、实时回传等关键技术的应用场景、技术难点和解决思路,展望了低空感知物联网在城市生命线感知、公共与安全生产感知、自然灾害感知等典型感知场景中的应用前景。随着WiFi7、6G等通信技术的不断发展,无人机低空协同态势感知技术的高实时、高可靠、大覆盖等特性将得到进一步体现,成为城市应急救援指挥体系的重要组成部分,为“全灾种,大应急”的应急管理体系建设注入新的活力。
参考文献:
[1]刘晨熙,马睿,彭木根.无人机通信感知一体化:架构、技术与展望 [J]. 电信科学, 2023, 39(02):1-9.
[2]张旭东,李少波,李传江等.无人机集群综述:技术、挑战与未来[J/OL]. 无线电工程, 2023, 1-17.
[3]WANG Y , TONG Y , LONG C ,et al. Adaptive Dynamic Bipartite Graph Matching: A Reinforcement Learning Approach[C]// 2019 IEEE 35th International Conference on Data Engineering (ICDE). IEEE, 2019.
[4]张建行, 康凯, 钱骅,等. 面向物联网的深度Q网络无人机路径规划[J]. 电子与信息学报, 2022, 44(11):8.
[5]沈凡凡,杨博帆,梁琦玮,等.基于深度强化学习的无人机矿井自主巡航研究[J/OL].武汉大学学报(理学版), 2023, 1-10.
[6]WU K , MING J , TAN H Z . D2D Relay Selection Based on Joint Fuzzy and Entropy Theories with Social Similarity[J]. IEEE Transactions on Vehicular Technology, 2018, PP:1-1.
[7]Liu D,Xu Y,Wang J,et al,Opportunistic Utilization of Dynamic Multi-UAV in Device-to-Device Communication Networks[J]. IEEE Transactions on Cognitive Communications and Networking, PP(99):1-1.
[8]WZHONG X J,GUO Y,LI N,et al.Joint Relay Assignment and Channel Allocation for Opportunistic UAVs-Aided Dynamic Networks: A Mood-Driven Approach[J]. IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY,2020,69(12):15019-15034.
[9]徐子蒙,王博文,云霄,等.灾后无人机不确定偏好序下稳定中继选择方法[J].西安电子科技大学学报,2022,49(06):32-41+50.DOI:10.19665/j.issn1001-2400.2022.06.005.





 加载中,请稍侯......
加载中,请稍侯......
精彩评论